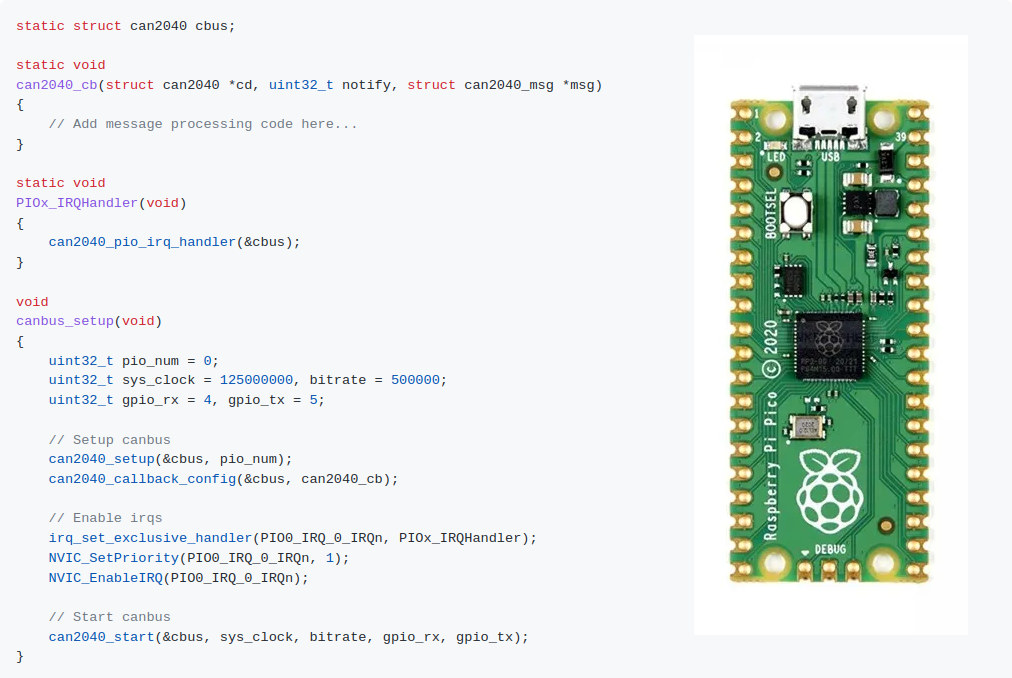
El proyecto can2040 es una implementación de bus CAN de software para el microcontrolador Raspberry Pi RP2040 que aprovecha E/S programables (PIO) para leer y escribir tramas de datos CAN 2.0B a velocidades de hasta 1 Mbit por segundo. Kevin O’Connor, el desarrollador del proyecto, explica además que la implementación usa solo uno de los dos bloques de hardware PIO RP2040, por lo que es posible que un solo chip Raspberry Pi RP2040 tenga dos interfaces de bus CAN separadas. Parte del procesamiento también ocurre en uno de los núcleos Arm Cortex-M0+ del microcontrolador y el tiempo de procesamiento depende de la cantidad de tráfico del bus, y un bus CAN completamente saturado a la velocidad más rápida admitida de 1 Mbit/s puede usar hasta alrededor del 30 %. de ese núcleo cuando se registra a 125 MHz, por lo que aún debería dejar mucho espacio para otras tareas que […]
El proyecto can2040 agrega software CAN bus al Raspberry Pi RP2040